


固高科技開放式可重組工業機器人控制系統開發平臺


固高科技的工業機器人控制系統開發平臺由開放、可重組的硬件平臺和軟件平臺組成。
產品分類:工業機器人 工業機器人 工業機器人 工業機器人 工業機器人 機器人關鍵零部件 機器人關鍵零部件 機器人關鍵零部件 機器人關鍵零部件 控制系統 控制系統 控制系統 軟件 硬件
品牌:固高科技
產品介紹
固高科技的工業機器人控制系統開發平臺由開放、可重組的硬件平臺和軟件平臺組成。開發平臺基于WINCE的操作系統,滿足機器人應用對實時性、安全性及穩定性的需求。該平臺針對有開發能力的機器人制造商、有行業應用需求的工業客戶和高校研究型機構,采用可二次開發的系統架構,為客戶定制工藝、算法提供解決方案。
機器人控制系統開發平臺提供弧焊、點焊、切割、噴涂、搬運、裝配、加工、碼垛、跟隨取放、數控雕刻等工藝,廣泛應用于汽車、食品、包裝、激光等行業。
功能特點
![]() 支持示教、回放、遠程控制模式
支持示教、回放、遠程控制模式
![]() 支持離線示教文件編輯
支持離線示教文件編輯
![]() 支持多工作空間監控(工作空間,障礙物空間,限制空間)
支持多工作空間監控(工作空間,障礙物空間,限制空間)
![]() 具有前進、后退示教檢查功能,機器人數控、仿真運行功能
具有前進、后退示教檢查功能,機器人數控、仿真運行功能
![]() 關節空間PTP指令,笛卡爾空間PTP指令,笛卡爾空間直線、圓弧CP指令
關節空間PTP指令,笛卡爾空間PTP指令,笛卡爾空間直線、圓弧CP指令
![]() 可支持不同構型機器人,支持超過35種4-6軸標準結構及非標結構的工業機器人本體
可支持不同構型機器人,支持超過35種4-6軸標準結構及非標結構的工業機器人本體
![]() 可調整機器人動力學參數
可調整機器人動力學參數
![]() 可配置常見主流品牌的伺服驅動系統
可配置常見主流品牌的伺服驅動系統
![]() 支持客戶自定義本體構型和二次開發自定義工藝模塊
支持客戶自定義本體構型和二次開發自定義工藝模塊
![]() 支持兩個外部軸控制,實現8軸聯動
支持兩個外部軸控制,實現8軸聯動
![]() 支持機器人數控雕刻工藝
支持機器人數控雕刻工藝
![]() 支持無傳感拖動示教功能(支持機器人動力學參數標定)
支持無傳感拖動示教功能(支持機器人動力學參數標定)
![]() 支持機器人標定算法模塊(需專用檢測設備支持)
支持機器人標定算法模塊(需專用檢測設備支持)
系統架構
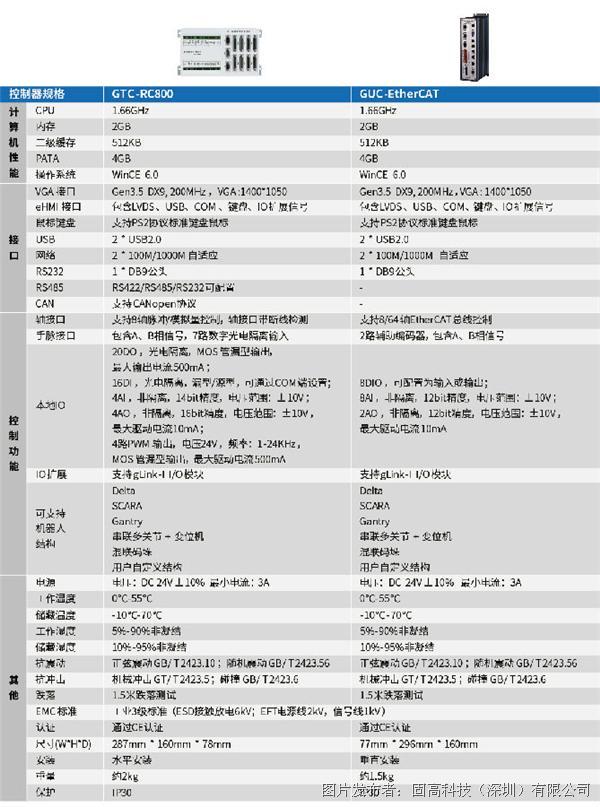
GTC-RC800

GUC-EtherCAT

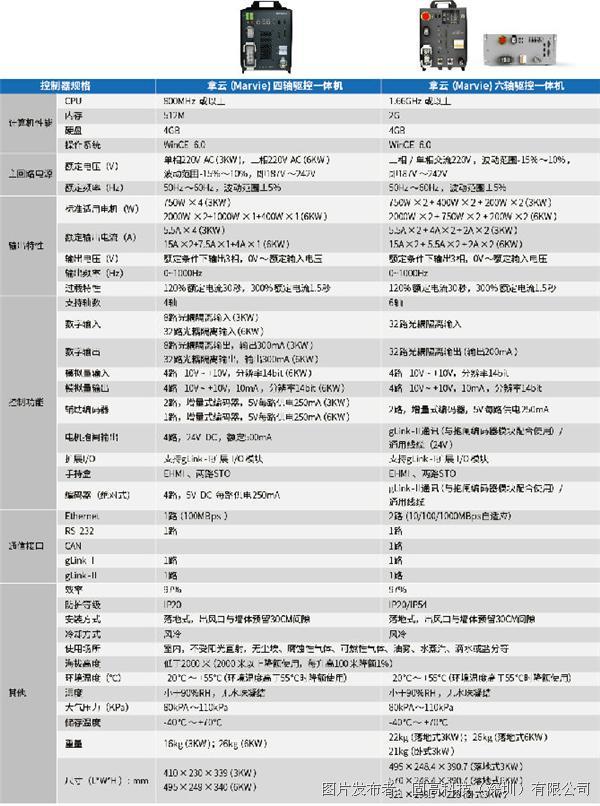
拿云(Marvie)四軸驅控一體機

拿云(Marvie)六軸驅控一體機


軟件平臺

開發環境特點:
![]() 開放式、可重組機器人應用系統二次開發平臺,提供全類型機器人運動學模型函數和軌跡插補接口
開放式、可重組機器人應用系統二次開發平臺,提供全類型機器人運動學模型函數和軌跡插補接口
![]() 完全符合IEC61131-3標準,支持C/C++語言編程
完全符合IEC61131-3標準,支持C/C++語言編程
![]() 精確到1MS的實時內核
精確到1MS的實時內核
![]() 支持第三方UI界面開發工具
支持第三方UI界面開發工具
![]() 支持網絡訪問與維護
支持網絡訪問與維護
![]() 多重加密功能,保護客戶知識產權
多重加密功能,保護客戶知識產權
![]() 方便實現智能制造與生產管理
方便實現智能制造與生產管理


機器人離線編程軟件:
![]() 模塊化可集成:軟件采用模塊化設計,可根據客戶不同需求定制
模塊化可集成:軟件采用模塊化設計,可根據客戶不同需求定制
![]() 機器人建模:采用POE對機器人進行建模,支持各種機構的建模仿真
機器人建模:采用POE對機器人進行建模,支持各種機構的建模仿真
![]() 碰撞檢測與距離計算:快速實現仿真模型的最小距離計算和碰撞檢測
碰撞檢測與距離計算:快速實現仿真模型的最小距離計算和碰撞檢測
![]() 三維環境的人機交互:提供友好的交互方式,方便用戶開發使用
三維環境的人機交互:提供友好的交互方式,方便用戶開發使用
![]() 正逆運動學:支持串并聯機構正逆運動學通用算法
正逆運動學:支持串并聯機構正逆運動學通用算法
![]() 動力學:實現串并聯機構的通用動力學算法
動力學:實現串并聯機構的通用動力學算法
![]() 軌跡規劃算法:可以自動規劃無碰撞的機器人軌跡
軌跡規劃算法:可以自動規劃無碰撞的機器人軌跡
![]() 軌跡優化算法:最小化時間和能量的機器人離線優化軌跡算法
軌跡優化算法:最小化時間和能量的機器人離線優化軌跡算法
![]() 虛擬控制器:實現精準的時間與軌跡控制,仿真效果與實際控制器相同
虛擬控制器:實現精準的時間與軌跡控制,仿真效果與實際控制器相同
![]() 機器人指令生成:生成支持不同控制器的指令語言
機器人指令生成:生成支持不同控制器的指令語言
![]() G代碼解析:解析UG,Powermill等CAM軟件生成的代碼,導入仿真環境
G代碼解析:解析UG,Powermill等CAM軟件生成的代碼,導入仿真環境
![]() 工藝包定制:可以定制焊接、標定、CNC等機器人常用工藝包,方便客戶使用
工藝包定制:可以定制焊接、標定、CNC等機器人常用工藝包,方便客戶使用

硬件平臺
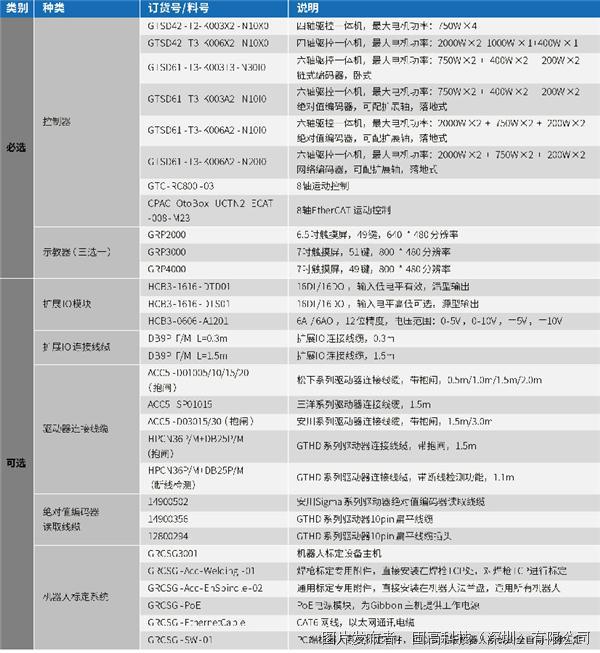
訂貨信息
作為中國及亞太地區領先的運動控制產品及技術供應商,固高科技在為裝備制造業提供的技術創新平臺之上專注于開展運動控制技術、伺服驅動技術、機器視覺技術和機械優化設計四個方向的核心技術研究,運控技術及產品廣泛應用于微電子、機器人、數控機床、電子加工和檢測、印刷、包裝、及生產自動化等工業控制領域。

關注固高,獲取最前沿的行業資訊。




 投訴建議
投訴建議
提交

固高GSVD系列高性能伺服驅動器在擠壓式涂布設備高精密氣浮平臺的應用
決賽預熱 | “ 固高杯 ”全國工業控制及數智化系統設計大賽

喜訊!質保期延長至36個月!

【固高GSHD系列高性能伺服驅動器系列教程】—電流環調試、慣量比識別
2025固高科技與您攜手并進,共創未來!